

超声波电机的原理和特点
超声波电机与普通电机的区别

在典型的电机中,当电流流过线圈时,线圈周围会产生磁场。 在该磁场和磁铁之间,相同磁极之间产生排斥力,不同磁极之间产生吸引力。 电机利用这一原理,通过电流引起的磁场和磁铁之间的相互作用产生旋转运动。 由于利用电磁力产生旋转运动,因此电机不能在高压或磁场环境中使用,否则会发生故障。 此外,当电源关闭时,中心轴会自由旋转,无法保持姿态。
超声波电机可以解决这一问题。 本节将介绍旋转原理中不使用电磁力的超声波电机的特点。


技术和开发信息





点击此处查看总目录
超声波马达

可从本页订购 Piezo Sonic 产品资料和手册。

直流电机
步进电机


通用汽车
断电
我无法保持姿势

高压、磁场环境

无法正常操作
能保持姿势
断电
超声波马达
高压、磁场环境
能够正常运行

点击此处查看 CAD 数据
可从本页订购 Piezo Sonic 产品的 CAD 数据

电话查询
03-6379-6020
营业时间
10:00~18:00
(周六、周日、节假日休息)
联系我们
Piezo Sonic 超声波马达

有关产�品、报价和各种咨询的问题,请使用咨询表。

Piezo Sonic 致力于开发电机与机器人技术相结合的应用。
点击此处了解机器人开发、咨询和开发服务。
机器人开发项目介绍
压电陶瓷不使用线圈或磁铁来产生旋转能量,而是使用在施加电压时会变形的压电陶瓷。压电陶瓷的形变由一个称为定子的金属部件放大,定子控制形变,从而在定子表面产生旋转运动。这种旋转运动通过摩擦力传递到转子上,转子压在定子上,使转子旋转。 轴固定在转子上,向外传递电机的扭矩和旋转。由于这种摩擦力是持续产生的,因此即使在电机断电和不受控制的情况下(高保持力),位置也能保持不变,从而实现了无间隙直接驱动。

传统超声波电动机比相同尺寸的电磁电动机(如直流电动机)具有更高的扭矩,但使用寿命较短,仅为传统电动机的 1/10。压电声波超声波电动机:通过重新审视结构和材料,压电声波电动机成功地将使用寿命延长至相同尺寸传统超声波电动机的两倍以上,并实现了与步进电动机相当的使用寿命。此外,它还大大提高了扭矩。(获得专利,2018 年荣获日本精密工程学会颁发的 "Monozukuri 奖",2019 年荣获 "优秀设计奖")。

超声波电机特点

直流电机
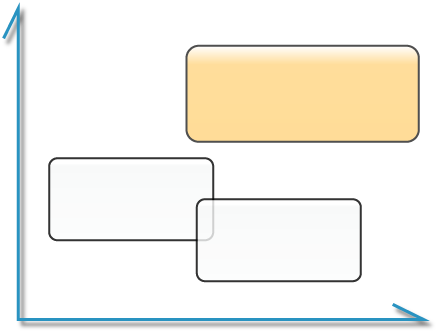
本区域图主要介绍相同尺寸的超声波电机、直流电机和步进电机的扭矩与速度之间的关系。
与其他电机相比,超声波电机的特点是低转速和高扭矩。
即使在因摩擦力而不受控制的情况下,它们也能保持较高的保持力,并且没有反向间隙,因此可以构建无齿轮的直接驱动致动器系统。
步进电机
超声波马达
本区域图重点介绍相同尺寸的超声波电机、直流电机和步进电机的位置可控性与重量(轻量级)之间的关系。
与其他电机相比,超声波电机的特点是重量轻、位置可控性高。
旋转部件重量轻意味着惯性小,当驱动信号停止时,电机会因摩擦力而立即静止,从而实现精确定位。 (最终定位精度取决于外部传感器:编码器或电位计以及控制控制器)。
超声波马达
步进电机
直流电机

与竞争产品的比较




压声马达
其他制造商生产的超声波电机
步进电机
直流电机
可用于磁场环境
用零功率保持姿态
相同尺寸的功率
定位精度
使用寿命(间歇运行)
1.2纳米
1.0牛米
约0.8Nm
约0.05Nm
系统 ± 0.045°
系统 ± 0.09°
系统 ± 0.36°
系统 ± 1.0°
6,000 小时(间歇性)
1,500 小时
5,000小时
10,000小�时
薄
作为执行器的优势
-
1 ・・・ 低转速、高扭矩
-
2 ・・・ 无电源时的高保持力
-
3 ・・・ 高响应性和可控性
-
4 ・・・ 结构紧凑,重量轻
-
5 ・・・ 操作安静
-
6 ・・・ 可采用中空结构
-
7 ・・・ 非磁性




超声波电机精密平台

紧凑型输送和分度设备
通用运输设备、紧凑型 XY 运输设备


是磁共振成像环境和精密定位机器人电机的理想选择
转向机制
积极的支持者
超声波电机扭矩测量仪
研究机构
- 结构紧凑、噪音低、工作精确 -

Piezosonic motor 应用领域

医疗机构
- 精密、无磁 -
工厂
- 保持扭矩、精度 -



日常生活
- 支持和援助 -
